The
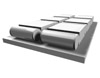
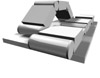
Project aims at illustrating how physical objects can relate in their physical
shape. Identical dimensioned objects whose shape suggests their relation allow
different ways of interaction. One object expands in length whereas the other
rotates around its joints. The two different kinds of movements are related
to each other through the use of sensors and servos and a basic stamp. The sliding
motion of one object is mapped to the rotation of the other. The objects therefore
relate through their physical shape and through their synchronized translation
and rotation. Often the shape of objects is controlled either directly on the
object itself or through a remote interface.
This installation tries to suggest the creation of objects in communication
where the manipulation of one object causes the reconfiguration of another.
This principle could be employed with furniture or interiors or on a larger
scale for kinetic architecture application where the adjustment of for example
a seat might cause a table to follow in its height. The forms chosen try to
suggest the object's capability to either extend or to rotate through the exaggerated.
It is an abstract installation more then an application. Ideally the interaction
would be possible both ways so that each object can be manipulated and can move
on its own. The current implementation allows only the manipulation of one the
objects.